





关键词 |
便捷桁架机械手,湖北桁架机械手,桁架机械手解决方案,桁架机械手厂家 |
面向地区 |
全国 |
加工定制 |
是 |
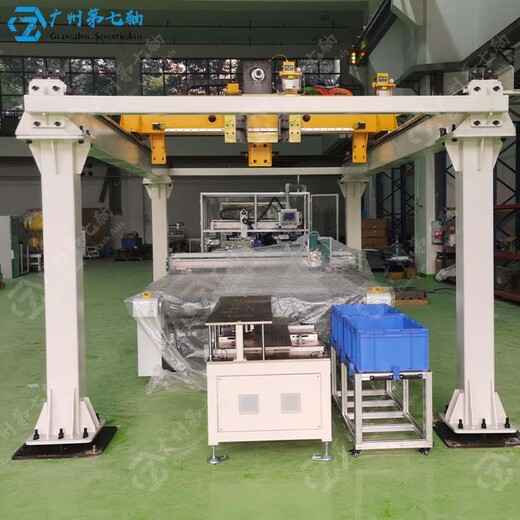
桁架机械手的空间运动是用三个相互垂直的直线运动来实现的。桁架式机械手通过工业控制器(如:PLC,运动控制,单片机等)实现。由于直线运动易于实现全闭环的位置控制,所以,桁架式机器人有可能达到的位置精度(μm级)。
桁架机械手的结构尺寸要比其他类型的机器人的结构尺寸大得多。桁架式机器人的工作空间为一空间长方体。通过控制器对各种输入(各种传感器,按钮等)信号的分析处理,做出一定的逻辑判断后,对各个输出元件(继电器,电机驱动器,指示灯等)下达执行命令,完成X,Y,Z三轴之间的联合运动,以此实现一整套的全自动作业流程。
桁架机械手主要由多种机器人行走轴搭建而成,各机器人行走轴由重载铝型材、滚轮直线导轨和伺服电机等组成。作为运动框架和载体的重载铝型材其截面形状通过有限元分析法来优化,生产中的尽心竭力,提高其强度和直线度。采用滚轮V型导轨作为运动导轨。
桁架机械手采用型材或方钢做为主框架,镶嵌直线滑动导轨和齿轮齿条等组成,作为运动框架和载体的精制型材其截面形状通过有限元分析法来优化,生产中的尽心竭力,提高其强度和直线度。
上下料桁架机械手通过驱动部分来产生动力,因此驱动部分也是它的动力源,通常有液压、气压、电力以及机械式驱动四种不同的驱动形式。其中,液压驱动系统是由油缸、阀、油阀和油箱等组成;气压驱动系统是由气缸、气阀、空压机(或由空气压缩机站直接提供)和储气罐等组成;电机驱动系统是由一些电动机组成。
桁架机械手的控制部分一般包括有程序控制部分与行程检测反馈部分,是上下料机械手中的指挥系统,因为上下料机械手中的每一个程序动作都是由控制部分来指挥执行的,包括动作的执行顺序、动作的起始位置以及时间等,此外,对运行的速度和加速度也能进行控制。

全国桁架机械手热销信息